Flying Squirrel Drone Agility
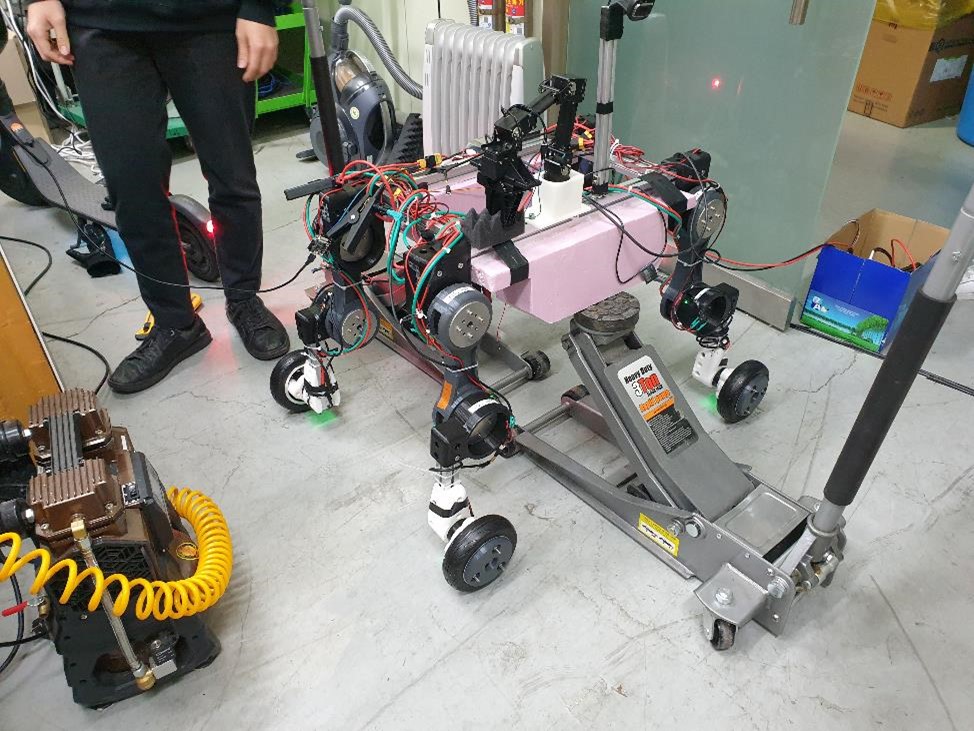
A Highly Maneuverable Flying Squirrel Drone with Agility-Improving Foldable Wings
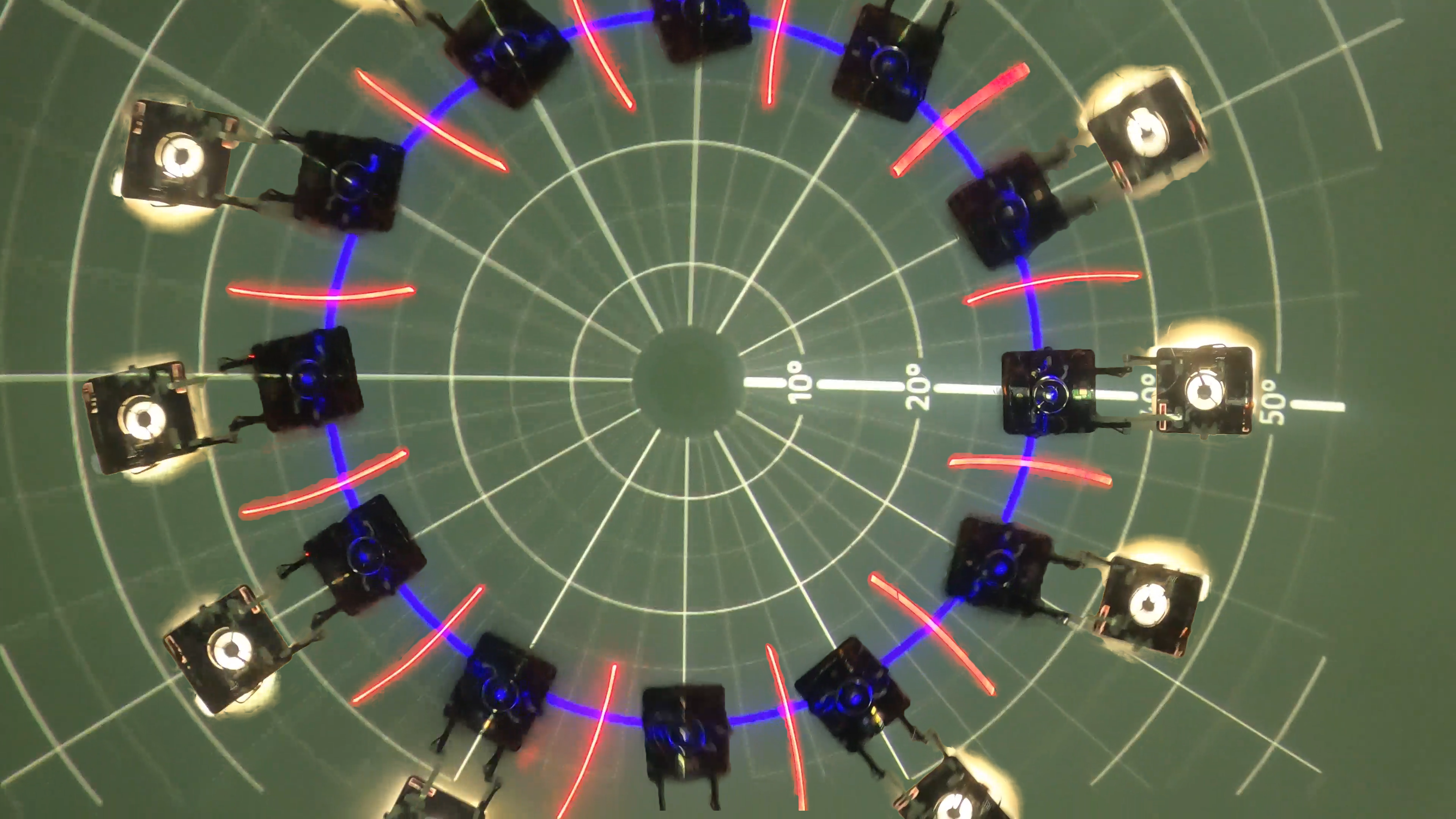
Developing a general trajectory tracking controller for a flying squirrel drone by learning wing dynamics and coordinating thrust–wing control for agile maneuvers.